



This wall is among the largest robotically constructed structures in existence. It was built using an autonomous excavator out of readily available waste concrete and stones.
The aim of the research behind the Robotic Stone Wall conducted at ETH Zurich is to autonomously construct load-bearing structures, such as walls and columns, on an architectural scale using found and readily available materials such as waste concrete and stones.
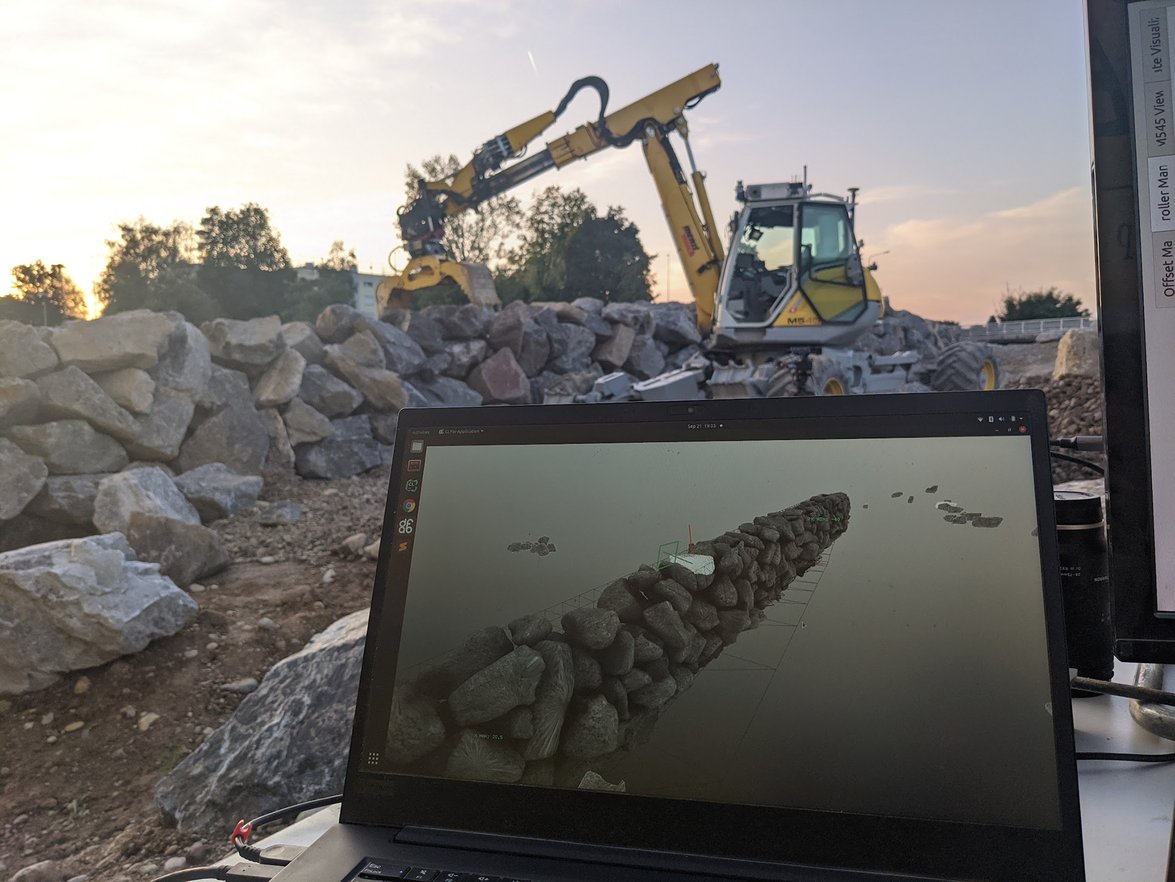
The process is made possible through the application of the robotic excavator HEAP (Hydraulic Excavator for an Autonomous Purpose), a customized Menzi Muck M545 12t walking excavator developed by the Robotic Systems Lab, ETH Zurich that is currently the most advanced robotic excavation platform to be applied to complex construction tasks.




Building with locally sourced boulders and waste concrete has the potential to drastically reduce the environmental carbon footprint of construction for specific applications. While such dry-stone masonry walls have historically been widely utilized for partitions, retaining walls and terracing, there are many complexities associated with their production, calculation and verification that make them less viable in the context of modern construction.
This project demonstrates that computational methods, machine vision approaches, and new control methods can be successfully integrated to handle geometric variety of stone and rubble shapes in an ongoing construction process in an unstructured site condition.
The permanent retaining wall at the Circularity Park represents the largest demonstration of this method.
The structure is 65 meter long, 6 meters tall at its apex, and consists of 938 individual elements (boulders and concrete demolition debris, with an average mass over 1000 kg each)—placing it among the largest robotically fabricated structures in existence.
The HEAP robotic excavator is equipped with GNSS receivers, joint encoders, and IMUs that allow for localization of the machine. Cabin- and arm- mounted LiDAR sensors provide a 3D map of the construction site and the available raw materials. Custom vision algorithms use this map for the detection and segmentation of individual building components on site, and these are individually picked up and fully scanned in-hand by spinning the excavator’s gripper in view of the cabin-mounted LiDAR sensor. The mesh produced by this process provides a full geometric understanding of each stone, including attributes such as estimated weight and center of mass.
At each stage of the construction process, the mapping is updated such that the known positions of any stones can be accurately refined, allowing the process to account for any settling or shifting that occurs as stones are grasped or placed in the wall.
A custom geometric planner algorithmically determines where stones should be placed in a given wall, and can be used to automatically place available boulders and concrete debris such that they align to any designed wall shape. The construction sequence works in batches of scanning, planning and placing: it maintains only a limited inventory of about 20-30 stones to minimize clutter on the construction site, and more stones are scanned as the inventory is depleted and new material is delivered. The heavily parallelized planning algorithm adapts to the site terrain and the state of any already-placed stones, and combines concepts from traditional manual masonry methods together with computational strategies of geometric registration, optimization, simulation, and machine learning to select and position the available stones within the wall.
A robotic grasp-planning workflow uses 3D mapping and collision constraints to reliably grasp irregularly shaped stones with the excavator’s 2-jaw gripper. If a stone cannot be placed directly from its current pose due to kinematic restrictions or collisions, a flipping routine allows the excavator to autonomously grasp and reorient the stone to an intermediate pose before placement in the wall.
Though this digital construction method was developed based on vernacular construction techniques, it requires novel methods of structural verification. Based on discussions with project engineers, testing methods were needed to validate the local stability of individual stones, especially considering extreme loading events. Manual testing methods in addition to a novel robotic load testing approach were developed for this purpose.
A 6 Degree of freedom force torque sensor was integrated on the arm of HEAP, which can sense forces and torques in all X,Y, Z directions. A robotic load testing procedure was parameterized to apply a threshold force at a target contact position along a vector approach direction, to validate that the individual stones could withstand the point load cases without slipping. Currently, this method can primarily be utilized to locate unstable and non-load bearing stones, but may have more generalized use during construction to validate the load bearing behavior of the walls in coordination with calculations and FEM approaches.
For retaining walls in particular, previous research by Farcas and others from 2015 has suggested the sustainable advantages of masonry benchmarked against concrete in terms of CO2 consumption and energy footprint. Significantly, dry-stone masonry surpasses these performances, considering the construction process can take advantage of locally sourced materials, and the structures are produced without mortar and are thus primarily reversible. The developed construction method for robotic dry stone masonry has an estimated 40 to 70% CO2 reduction when compared to an equivalent reinforced concrete retaining wall, benchmarked with the real construction data, transportation distances, and crradle-to-gate energy of the raw materials. In addition, the developed method of construction can incorporate recycled concrete aggregates and thus could be used to upcycle a portion of the estimated 2.6 million tons of concrete recycled each year from demolished houses. Here in Zurich for example, this has particular significance, the approved landfill volume for recycled concrete will only be sufficient for the next ten years.